
Récolte sélective des asperges avec un robot autonome
AvL Motion innove avec une machine pour la récolte sélective des asperges blanches, "garnie" de capteurs de haute précision, ainsi que de la technologie RFID et des bus de terrain de Turck
La startup néerlandaise AvL Motion a mis sur le marché une machine pour la récolte sélective entièrement autonome des asperges blanches. Dans sa recherche d'un capteur ultrasonique pour le contrôle de la hauteur, l'entreprise est tombée sur la RU40U de Turck, compatible IO-Link. La collaboration qui s'en est suivie a permis d'intégrer davantage de capteurs dans le véhicule, notamment des détecteurs de proximité inductifs miniatures, des encodeurs précis ainsi que des capteurs laser LE550 de Banner Engineering et le robuste capteur de position linéaire Li500-Q25. AvL utilise également la tête de lecture/écriture RFID TN-Q14 pour l'identification des modules de récolte, tandis que le module d'E/S compact TBEN-S2-4IOL transfère les signaux IO-Link à l'automate.
-turck-image.jpg)
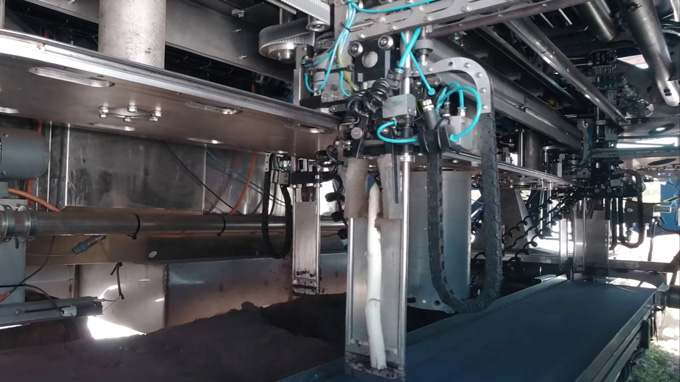
The AvL Compact S1560 pulls asparagus spears automatically from the soil

Six to twelve harvesting modules are located on the machine

AvL founder Arno van Lankveld uses Turck's IO-Link ultrasonic sensor RU40U

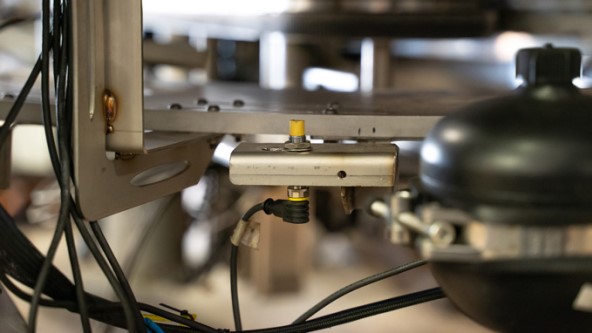
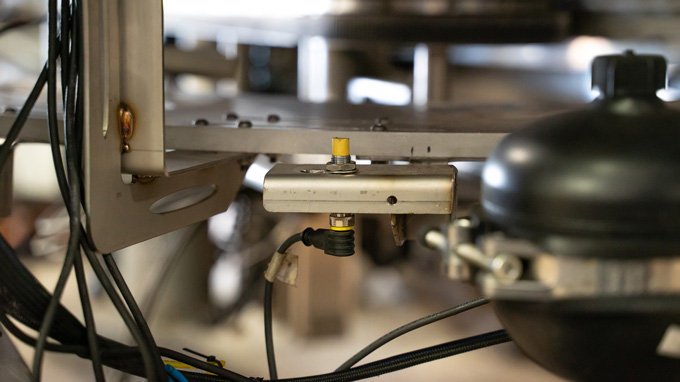
Thanks to its robust design, the Li500-Q25 sensor can also be fitted outside above the front axle

BI3-M08K miniature sensors in the buffer area detect the number of harvesting cassettes
When a cassette passes the NI10U-M12, the PLC starts the timer for a harvesting operation

Turck encoders report at which position of the buffer a harvesting module is currently available

On the driver's platform, a worker packs the asparagus into boxes and has control of the harvester

The TBEN-S2-4IOL multiprotocol device is used as an interface between sensors and PLC
-turck-thumbnail.jpg)








.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Contrôle de la hauteur par capteur ultrasonique avec IO-Link
AvL Motion utilise deux des capteurs ultrasoniques RU40U avec IO-Link pour mesurer la distance entre le champ d'asperges et le châssis interne de la machine à commande pneumatique. Malgré le fait que le terrain soit partiellement poussiéreux ou glissant sous la pluie, les capteurs permettent une mesure stable de la hauteur, que les utilisateurs peuvent paramétrer sur une IHM. "Turck nous a impressionné par la qualité exceptionnelle et la rapidité de livraison de leur produit. Nous sommes donc restés en contact avec le fabricant pour les autres composants", déclare Arno van Lankveld, PDG d'AvL.
Le processus optique remplace le regard
Le processus de récolte de l'AvL Compact S1560 est très dynamique. Une fois que la machine est positionnée et mise en route, la surface du sol est scannée. L'emplacement précis d'une extrémité d'asperge est détecté par le contrôleur principal grâce à l'utilisation de capteurs laser, ainsi qu'à un procédé optique supplémentaire. Un nombre variable de modules de traitement se déplacent au cours du processus sur une piste circulaire à l'intérieur du robot. Celui-ci se compose actuellement de 12 des 25 centimètres de hauteur de cassettes environ. Elles sont ajustées à la vitesse du robot et contrôlent l'ensemble du processus d'insertion, de coupe et de saisie.
Réglage fin entre la cible et le module de récolte
Le contrôleur a non seulement besoin des coordonnées des asperges sélectionnés pour affiner le processus de récolte, mais aussi d'un flux continu d'informations sur la position et le mouvement des modules. Cela commence par l'interrogation du nombre de cassettes se trouvant actuellement dans la mémoire tampon, c'est-à-dire combien sont en position de parc, et de celles qui détectent actuellement une asperge dans le circuit. Pour cela, AvL utilise les minuscules capteurs inductifs BI3-M08K. L'identification exacte des modules de récolte est réalisée par RFID - à l'aide de la tête de lecture/écriture TN-Q14 HF, qui lit le code individuel de chaque cassette. À cela s'ajoute la détection de position fournie par un encodeur rotatif.
Un capteur inductif déclenche une minuterie
Lorsqu'une machine de récolte démarre son circuit, elle passe un détecteur de proximité uprox de type NI10U-M12, qui règle le fonctionnement de la minuterie pour le processus de récolte dans l'automate. Comme les asperges ne poussent pas dans des rangées bien ordonnées, les modules de récolte peuvent également se déplacer vers la gauche ou vers la droite en plus de leur déplacement sur la piste circulaire. Celle-ci est entraînée par de l'air comprimé et est donc toujours retardée de quelques dixièmes de seconde. Afin de garantir néanmoins l'alignement correct des cassettes, l'automate obtient des informations sur la distance entre la position initiale et la position cible des modules, mesurée à l'aide de capteurs laser LE550 de Banner Engineering, partenaire optoélectronique de Turck.
Manœuvre de virage par joystick
Les opérateurs utilisent un module de commande externe pour contrôler la vitesse et la direction hydrostatique de la machine de récolte. Deux encodeurs Turck mesurent les rotations de la roue ; AvL utilise un capteur de position linéaire inductif pour mesurer la position de la roue. Pour cela, l'élément de positionnement du capteur LI500-Q25 est relié au piston du cylindre de direction. De cette manière, le contrôleur principal calcule l'angle des deux roues en utilisant une seule valeur - et les opérateurs peuvent faire tourner la machine facilement avec un joystick. Contrairement aux modèles proposés par la concurrence, les agriculteurs n'ont pas besoin d'attacher le AvL Compact S1560 à un tracteur.
Informations Complémentaires
- c04b_DOWNLOAD-Item 37617 [PDF, MB]
- Vidéo (YouTube) : Le robot de récolte d'asperges blanches entièrement autonome
- En un coup d'œil : Portfolio de codeurs pour de nombreuses applications industrielles
- Lien vers le produit : Capteur à ultrasons RU40U-M18E-LIU2PN8X2T-H1151
- Lien vers le produit : Capteur inductif BI3-M08K-AP6X-V1131
- Lien vers le produit : Capteur inductif NI10U-M12-AP6X-H1141
- Lien vers le produit : Capteur de position linéaire inductif LI500P0-Q25LM0-LIU5X3-H1151
- Lien vers le produit : Capteur photoélectrique LE550IQ
- Lien vers le produit : Détecteur photoélectrique avec IO-Link LE550KQ
- Lien vers le produit : Tête de lecture/écriture HF-RFID TN-Q14-0.15-RS4.47T
- Lien vers le produit : Module d'E/S multiprotocole compact TBEN-S2-4IOL
- Télécharger l'article complet - more12050e [PDF, 1,31 MB]
- Automobile
- Mesure de niveau dans une ligne d'enduction par trempage
- Contrôle du niveau dans le système de lubrification centrale
- Assurance qualité sur le robot de collage
- Le capteur d'angle d'inclinaison accélère l'alignement de la plate-forme
- Contrôle des Moteurs avec Condition Monitoring
- Module hybride IP67 Processus de traitement des signaux de sécurité
- Surveillance décentralisée des stations de refroidissement
- Cellules de soudage robotisées mises en réseau par Ethernet
- Surveillance du circuit de refroidissement des pinces à souder
- Contrôle du débit dans les laveurs de tambours
- Mesure d'épaisseur de tôle
- Condition Monitoring des moteurs
- Contrôle de niveau basé sur le cloud
- Atelier de presse – Identification d'outils
- Carrosserie – Détection des écrous à souder
- Atelier de peinture – Identification de skids
- Montage final – Montage robotisé
- Équipementiers – Système d'identification de pare-chocs
- Mécanique – Vérification sans contact
- Détection des corps dans la production automobile
- Protection de zone pour les cellules robotisées
- Détection au niveau des articles avec la RFID UHF
- Fourniture de réfrigérant lubrifiant dans les machines-outils
- Contrôle de la pression hydraulique dans les usines de pressage
- Mesure de la pression de processus sur les élévateurs à ciseaux
- Inspection des becs sur des robots de soudure
- Chargement manuel dans une cellule de soudage
- Détection de pièces noires sur des panneaux de porte noirs
- Détection de verre transparent sur un toit vitré
- Inspection à longue portée dans le secteur de l'assemblage automobile
- Détection de rondelles de caoutchouc sur un bloc moteur
- Détection du positionnement des pièces dans un bloc moteur
- Détection de véhicules électriques aux bornes de recharge
- Détection de voitures dans un car-wash en libre-service
- SUCCESS STORIES
- Un capteur laser détecte les pare-chocs noirs dans une cellule d'assemblage
- Technologie de sécurité décentralisée pour une production modulaire
- Système de transport modulaire
- RFID and I/O Modules for Safe Tool Changes
- La technologie RFID pour guider un chariot autoguidé dans la production de suspensions
- IO-Link Wired Silencer Production
- Workpiece Carrier Identification in Rear Vent Production
- Détection d'écrous à souder
- Traçabilité RFID
- Technologie RFID dans la production de moteurs
- Production de pare-chocs avec système d'identification
- Solutions pour ateliers de peinture
- Capteurs de soudage et d'assemblage
- Capteurs d'angle pour systèmes d'assemblage
- Identification d'outils
- Système d'aide au choix pour la production de modules de pilotage
- Identification RFID des buses d'injection
- RFID in the Body Shop
- Ply Orientation Inspection
- IO-Link Eases Differential Gear Production
- Chimie
- Contrôle RFID des raccords de tubes dans la zone Ex
- Connexion du signal Ethernet dans la salle I&C
- Automatisation des skids modulaires par Ethernet
- Isolation Ex dans les usines de traitement modulaires
- Détection d'écouvillons
- Systèmes d'E/S déportés pour le traitement de signaux
- Télésurveillance des niveaux de cuves avec le DX70
- Connexion aisée des équipements de terrain
- Traitement des signaux avec un système d'E/S dans l'armoire de commande
- Séparation des signaux avec une technologie d'interface dans une armoire de commande
- Identification de raccords de tuyaux
- Surveillance efficace d'armoires sur le terrain
- Surveillance d'actionneurs quart de tour
- Planification et assemblage de solutions système
- Success Stories
- Gain d'espace dans les salles I&C grâce au système d'E/S excom
- Technologie RFID pour les zones 2 et 22
- Contrôle de test efficace
- Communications de terrain intrinsèquement sûres
- Développement d'un système de contrôle des processus en partenariat
- Système d'E/S déporté pour zones dangereuses
- Double retour d'information sur la position des vannes
- La flexibilité offerte par un bus de terrain
- Asset Management with Remote I/O
- Positionnement correct avec la technologie RFID dans la production de carbure
- Fast conversion in restricted space
- Energie
- Agro-alimentaire
- Condition Monitoring des armoires de commandes
- Contrôle de la hauteur de la pâte pour une mesure précise
- Condition Monitoring dans les entrepôts
- Contrôle de l'épaisseur de pâte dans des lamineuses
- Identification de conteneurs alimentaires
- Détection du bord avant d'une barquette en plastique
- Détection de la position d'une vanne
- Vérification de récipients
- Vérification de l'exactitude de la date et du code de lot
- Détection de coudes de tuyaux
- Identification de moules à pralines
- Détection de petits pains réfrigérés sur un convoyeur multivoie
- Lecture de codes à barres dans un poste de dépalettisation
- Success Stories
- Détection de position linéaire fiable en zone Ex 22
- Modules de contrôle décentralisés dans les entrepôts frigorifiques
- Track and Trace in Meat Production with RFID
- Codeur sans contact pour la production de pommes de terre
- UHF RFID in Food Distribution Center
- La technologie RFID pour la production de pralines
- E/S distribuées pour l'équipement de production alimentaire
- Remote I/O for Distilleries
- RFID et autoclaves
- IP67 Power Supplies for Conveyors
- Transparency in Chocolate Manufacturing
- Identification dans l'entreposage de produits alimentaires
- Vérification fiable de l'orientation des bouchons dans des espaces aseptisés
- Détection de bouteilles transparentes renversées sur un dépalettiseur
- Détection de bouteilles en plastique transparent
- Inspection d'étiquettes d'emballages alimentaires surgelés
- Accumulation de bouteilles en file indienne sur une aligneuse simple
- Logistics
- Muting décentralisé des équipements de protection électro-sensible
- Contrôle des conteneurs
- Blocs d'E/S Modules de contrôle du convoyeur à rouleaux
- Détection rapide des étiquettes aux portes des entrepôts
- Détection au niveau de l'article avec la RFID UHF
- Maintenance préventive sur les bandes transporteuses
- Détection des conteneurs de transport
- Détection de niveau dans les récipients
- Identification des enceintes cryogéniques
- Identification des conteneurs mobiles à l'aide d'appareils portatifs
- Identification de conteneurs alimentaires
- Niveau 1 - Identification des pare-chocs
- Surveillance de l'état des locaux de stockage
- Protection contre les collisions sur les Reach Stackers
- Success Stories
- Solution RFID UHF décentralisée
- Contact-free Encoder in Potato Production
- Decentralized Control Modules in Coldstore
- Speed Control via Radar Sensor QT50
- IP67 Power Supplies for Conveyors
- Modular Conveyor System
- RFID Solution for Warehouse
- RFID Guides AGV in Suspension Production
- RFID Identifies Pharmaceuticals
- UHF RFID in Food Distribution Center
- Autonomous Parking Assistance for Trucks
- Equipement Mobile
- Surveillance de l'occupation d'un quai de chargement
- Compensation automatique de la pente
- Surveillance sans fil de roues de train
- Lignes de distribution pour pulvérisateurs agricoles
- Indication de l'état des reach stackers à l'aide de voyants lumineux intenses
- Mesure d'angle sur un pulvérisateur agricole
- Détermination du positionnement angulaire de la flèche
- Surveillance du sens de déplacement du matériau sur une moissonneuse-batteuse
- Véhicules dans une zone de chargement
- Éclairage de compartiments de rangement des équipements sur des véhicules de pompiers
- Signalisation sans fil pour chariot élévateur
- Mesure de l'inclinaison sur deux axes pour une moissonneuse-batteuse
- Protection contre la collision sur des reach stackers
- Success Stories
- Contrôle d'accès avec système RFID
- Selective Asparagus Harvester
- Position Measurement with RFID and Encoder
- Contrôle de la vitesse avec le capteur radar QT50
- La technologie RFID pour guider un chariot autoguidé dans la production de suspensions
- Modules d'E/S sur un super yacht
- Codeur inusable sur une drague porteuse
- I/O for Dust Suppression
- Cabinet Cooling
- Connectique à raccord rapide
- Automation Solutions for Extreme Cold
- Remote I/O for Cranes
- Rugged Heavy Metal Lifting
- Rollercoaster Positioning
- Mobile Machinery Solutions
- Positionnement de hauteur exact
- Maintenance prédictive des pièces des machines dans une infrastructure de transport du charbon d'un port
- Critical Angle Sensing
- Angle Sensor Detects Platform Lift
- Pétrole et Gaz
- Emballage
- Decentralized RFID Package Verification
- Identification de cartouches d'impression couleur
- Fonctionnement fiable des machines
- Surveillance des bouchons sur des lignes de remplissage
- Surveillance des processus de changement de produits
- Identification de bouteilles de test
- Surveillance du niveau de remplissage de café moulu
- Détection de la notice d'information dans une boîte
- Détection du niveau de remplissage des récipients
- Calcul des dimensions des boîtes en carton
- Détection de bacs de transport
- Success Stories
- Détection de barquettes transparentes
- Vérification de la présence d'étiquettes correctes
- Détection de boîtes de différentes tailles sur un convoyeur
- Contrôle des codes à barres 2D à haute vitesse
- Détection d'emballages réfléchissants multicolores
- Mesure de diamètre d'un rouleau de film en plastique
- Positionnement de tubes à l'aide d'un repère
- Solutions pour ensacheuse verticale
- Pharma
- Suivi des échantillons du début à la fin grâce à la RFID
- Contrôle RFID des raccords de tubes dans la zone Ex
- Decentralized package verification for pharmaceutical products
- Automate Modular Skids
- Comptage de comprimés à haute vitesse avec un amplificateur fibre
- Pharmaceutical Skids with Decentralized I/O Technology
- Ex Isolation in Modular Process Plants
- Détection de liquide dans des poches pour perfusion
- Control of Valve Interfaces
- Surveillance d'actionneurs quart de tour
- Détection de coudes de tuyaux
- Systèmes d'E/S déportés
- Planification et construction de superskids
- Surveillance de niveau de liquide dans une grande cuve
- Connexion aisée des équipements de terrain
- Identification de récipients cryogéniques
- Identification de contenants en mouvement
- Identification de contenants en mouvement à l'aide de terminaux portables
- Identification de raccords de tuyaux pour des précurseurs
- Identification de raccords de tuyaux dans des zones stériles
- Identification de raccords de tuyaux dans des zones explosives de classe 1
- Identification de big bags et de bioréacteurs
- Identification de produits à usage unique
- Semi-conducteur
- Electronic Marking Verification
- Counting Integrated Circuits
- Inspection of Two Barcodes
- Compact Safety Control
- Safeguarding Small Access Points
- Éclairage d'un outil de production dans le secteur des semi-conducteurs
- Adhesive Detection on PCB Assembly
- Détection du centre de plaques à l'aide du DF-G2
- Great Detail Inspection for Mobile Electronic Devices
- Error Proofing for IC Chips loaded into Pocket Tape
- Presence and Orientation of IC Chips Seated in Nests
- Detection of Hard Disks
- Multiproduct Light-Guided Assembly Station
- LED Status Indication During Semiconductor Manufacturing
- Safeguarding Small Access Points
- Success Stories